
Selection of TAVF users
On the user-independent test track, various innovative mobility applications will be tested and analysed in order to cope with the growing challenges of inner-city traffic and to identify new sustainable mobility concepts for the Free and Hanseatic City of Hamburg and other large cities. In the following we present a selection of TAVF's activities, partners and participating scientific research institutes.
A step towards automated driving, according to SAE Level 4
Logistics companies are facing a significant challenge: on the one hand, they are increasingly short of truck drivers, and on the other, they are confronted with constantly growing flows of goods. Autonomous driving is, therefore, of great interest to the entire industry. The European Commission has also set itself the goal of advancing research in this area and is funding the MODI project. A consortium of 29 partners from science and industry is developing and testing solutions for autonomous truck traffic. The aim is also to overcome legal and technical hurdles and to facilitate and harmonise approval processes across countries.
Picture source: Gruber Logistics. Hamburg, 2023
Period: 10/2022 – 03/2026
More informationen:

SILKOSTU (Security in intelligent communication between road users and urban infrastructure)
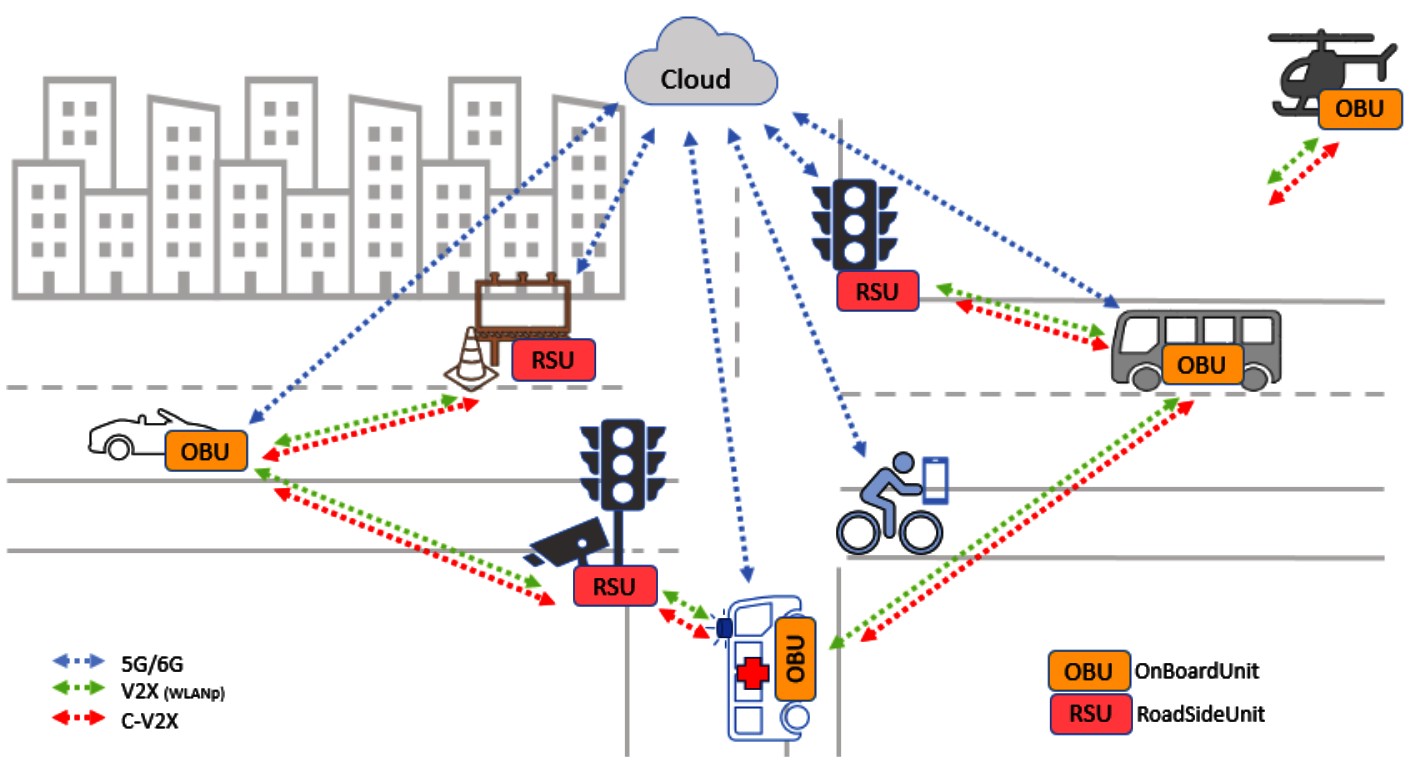
The direct networking of all players in road traffic is essential for safe, efficient and ultimately autonomous mobility. To this end, the project “SILKOSTU – Security in intelligent communication between road users and urban infrastructure” is developing new communication technologies that aim to connect all road users with one another while at the same time meeting the security requirements of ubiquitous cloud connections. SILKOSTU's aim is to research a hardware platform that combines various secure communication functions and operates the connected communication modules using application logic. SILKOSTU is funded by the Federal Office for Information Security (BSI) within the funding call "Cyber security and digital sovereignty in communication technologies 5G/6G".
Period: 01/2023 – 12/2024
More informationen:
ITS-CUBE (ITS Concept Urban Bus Equipment)
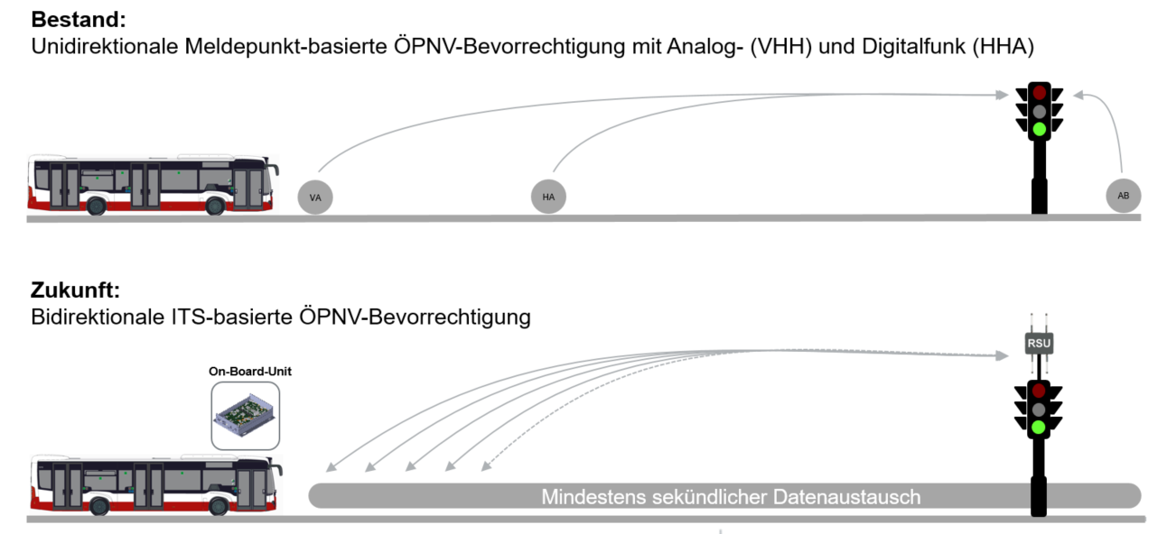
The goal of the project ITS-CUBE is to develop a dynamic and needs-based prioritisation of local public transport at traffic lights using networking via modern short- and long-range communication. More specifically, the project revolves around the development of an ITS concept for urban bus and infrastructure equipment, in which the standards, technology, architecture and method for future bus prioritisation are to be defined. In addition, a schedule for a roll-out by 2030 is being developed for a rapid conversion to future-proof technologies in bus prioritisation.
Period: 06/2023 – 05/2027
More informationen:

Provision of forecast values for traffic light phases via cooperative traffic infrastructure (Roadside Unit)
Yunex Traffic is a global leader in intelligent traffic systems, offering the broadest end-to-end portfolio. At TAVF, Yunex is installing Traffic C2X, a technology that connects vehicles to the infrastructure, thereby optimising traffic flow, increasing traffic safety and making roads fit for automated driving. Using the SPAT prediction method, changeover times are determined using the latest AI analysis methods. These forecasts of traffic light phases are transferred to vehicles via roadside units. In addition, the central SPAT cloud instance allows the forecast to be passed on to smartphone applications via service providers.
Period: 01/2019 – 12/2022
More informationen:
 Yunex GmbH")
EDDY – European Digital Dynamic Mapping
The EDDY research project is developing standards for openly accessible high-resolution dynamic map data. Up to now, such maps have been the property of large navigation services. With EDDY, now the foundations are being provided so that cities, municipalities and local authorities themselves can make the data available in an Urban Dynamic Map in a public interest-oriented manner. High-resolution, dynamic maps are needed for the guidance of urban traffic, for example in routing especially on routes with road works. The goal is to reduce emissions, protect vulnerable road users and enable higher levels of automated driving. The project partners can use their specially equipped vehicles to test the use cases on the Hamburg test track for automated and connected driving (TAVF).
Period: 11/2021 – 10/2024
More informationen:
 EDDY project")
NextPerception
The NextPerception project intends to make a leap beyond the current state of the art of sensing and to achieve a higher level of services based on information obtained observing people and their environment.
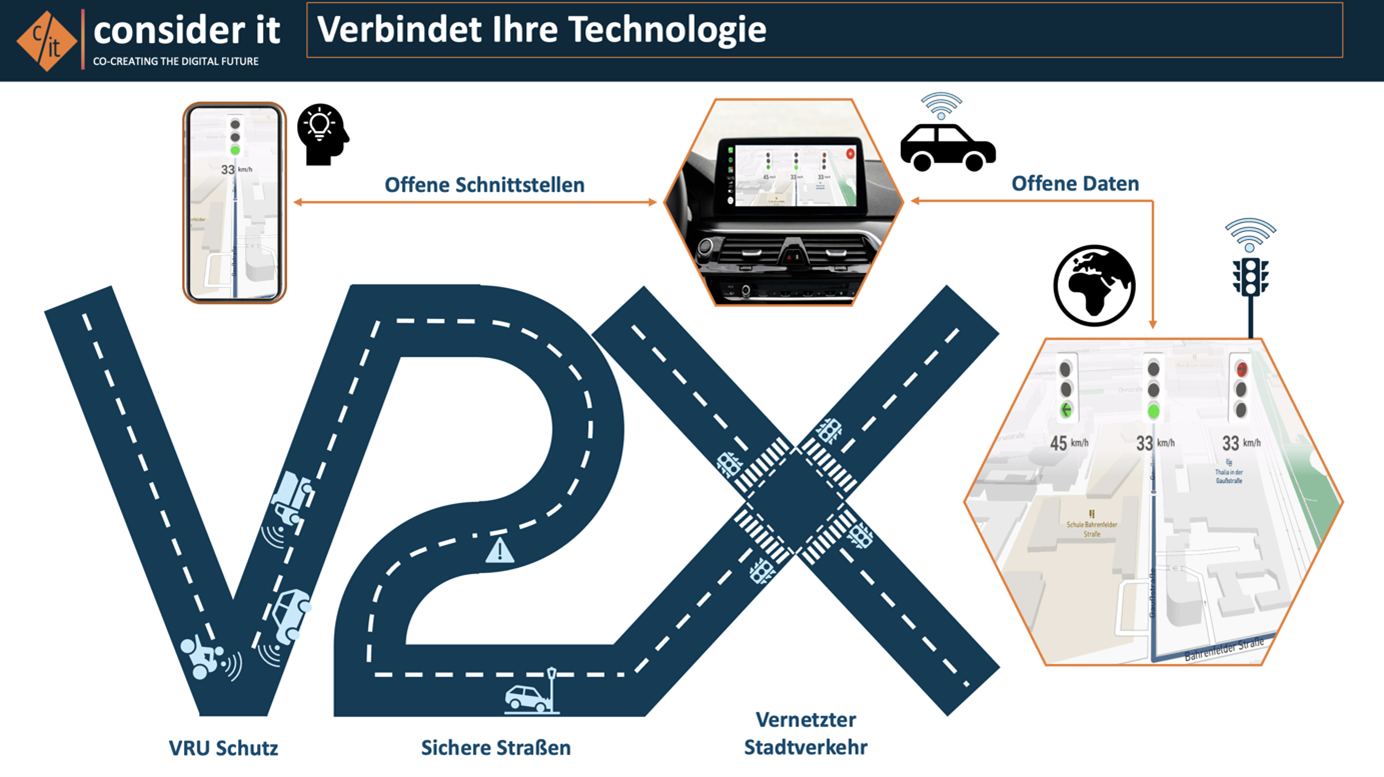
In the use case "Safety and comfort at intersections", various organizations are working on ways to protect vulnerable road users (VRU) such as pedestrians and cyclists at intersections. In order to be able to test the developments outside a laboratory environment, consider it GmbH is taking on the operator role at an intersection in Hafencity. There, demonstrators for VRU protection are tested together with partners from the project.
Period: 05/2022 - 12/2023
More informationen:
 consider it")
Shared Guide Dog 4.0
The aim of the Shared Guide Dog 4.0 project is to develop a technical assistance system that navigates blind and visually impaired people in the urban environment. As with bike sharing, the Guide Dog 4.0 will be available to numerous people in the sharing model, which reduces costs. For example, it can be based at a residential home for the blind and pick up individuals from the nearest subway station or guide them to the doctor.
On the TAVF, localisation in urban space and communication with other road users will be evaluated. Furthermore, infrastructure to protect vulnerable road users will be tested.
Period: 01/2022 - 12/2023
More information:
Shared Guide Dog 4.0

5G-Loginnov
5G-LOGINNOV is co-funded by the EC Horizon 2020 research and innovation program and deploys a wide range of port-driven technological and societal innovations related to 5G technologies and digital transformation. The innovations will be implemented and tested in three Living Lab (LL) environments, namely at the ports of Athens (Greece) and Luka Koper (Slovenia) as well as in the city of Hamburg (Germany).
At the LL Hamburg, the partners SWARCO, tec4U, Continental and T-Systems will demonstrate the potential of leveraging positive environmental impact by applying the functionalities of 5G for hybrid V2X-communication and traffic management, in particular outside the port and the hinterland. For this, an innovative set of use cases has been developed to be tested in Hamburg’s TAVF, e.g. Floating Truck and Emission Data (FTED), 5G based Green Light Optimum Speed Advisory (GLOSA) and dynamic control loop for traffic management actions (DCET).
A first demonstration of these use case was presented during the ITS World Congress on 11-15 October 2021.
Period: 10/2021 - 12/2023
More information:

Emergency Vehicle Priorisation at traffic control signals
As a project member of the BOS Realtime Routing, the Hamburg City Fire Department is working at the priorisation of emergency vehicles at traffic control signals. Main topics are the prevention of accidents during emergency rides, the protection of the firefighters, the accident prevention of others and especially the fast access to the scene of fire. The communication between the traffic lights and the emergency vehicle is based on a C-ITS (Traffic signal priority request) and ITS-G5. The vehicles are sending a priority request to the traffic lights on behalf of a V-ITS-S on-board unit, communicating with the R-ITS-S traffic light Roadside unit. The crossroad will be cleared for the incoming emergency vehicle.
A pilot project is running at the Hamburg City fire warden in collaboration with the LSBG, the HHVA and the BVM.
Period: 2020-2022
 Feuerwehr Hamburg")

Smart Infrastructure for automated-assisted Driving
Fraunhofer IVI together with the Fraunhofer Cluster of Excellence Cognitive Internet Technologies CCIT is advancing automated driving in cities: A Smart Intersection in Hamburg's city center records the movements of road users and processes the information in a trustworthy manner, converts them into a digital dynamic object map and transmits the current traffic situation to all traffic participants via Vehicle2X communications.
Not only does this kind of traffic detection improve the flow of traffic, but it also increases the safety of all participants substantially. Innovative algorithms are used to provide security against the risk of possible manipulation of cognitive functions. Thus, integral consideration is granted to measures for the protection of critical infrastructures.
Period: 10/2021 - 12/2022
More information:

Aftermarket V2X
As consider it we understand that change is not always easy. Consider it has been helping firms/companies of all sizes to remain competitive by reacting to market changes through technology and innovation changes from 2010 onwards – consider it even drives market changes through innovation.
Consider it has been driving and strengthening research and innovation in Germany with 110 project partners and 53 million Euro of public funding for 10 years, gaining project experience – A value you can build your activities on.
Three activities are going to support the TAVF test site:
- Continue collaboration with TAVF Partners on site via public funding and bi-lateral cooperation
- Continue Support of measurement and test of installed infrastructure as well as for mobile devices
- Develop and validate own development of an aftermarket V2X solution for vehicles
Period: 06/2021 - 12/2022
More information:
www.consider-it.de/about-consider-it/
Increasing traffic safety by optimizing the control of traffic light signaling systems and detecting vulnerable road users
VITRONIC Dr.-Ing. Stein Bildverarbeitungssysteme GmbH usses sensors to detect vulnerable road users (VRU) such as cyclists or pedestrians on the test track in order to be able to transmit their position to autonomous vehicles. The detection and transmission of complete movement trajectories of these road users allow communicating to potentially safety-critical traffic situations. The data transfer is done via standardised message formats. In addition, VITRONIC installs high-performance sensor technology to monitor the flowing traffic at the intersection of Schröderstiftstraße and Rentzelstraße. The acquired traffic data are integrated into the VITAL control system for traffic light signal systems of the German Aerospace Centre (DLR). The final evaluation of the data, which enables an optimised traffic light management, is carried out by DLR.
Period: 08/2020 - 12/2022

Collision Warning for vulnerable road users based on 5G technology
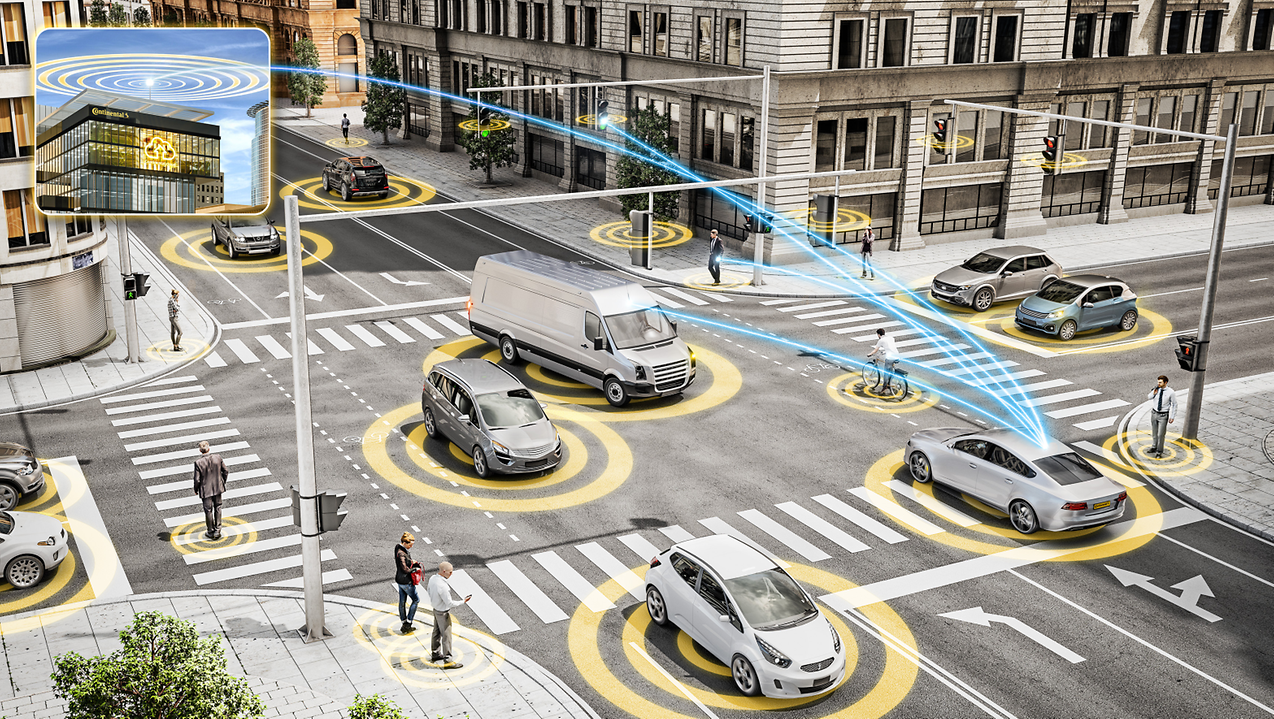
The goal is to increase safety for all road users via connected collision warning. The focus is on cyclists, pedestrians and e-scooter drivers as well as vehicles (cars, L4 Shuttle buses, etc.).
MEC (Mobile Edge Computing) should be used as part of the 5G strategy. The partners Continental, Deutsche Telekom and MobiledgeX enable the calculation of potential collisions and the evaluation and provision of information to the respective road users with low latency and high availability through the use of edge computing
Period: 02/2020 – 12/2022
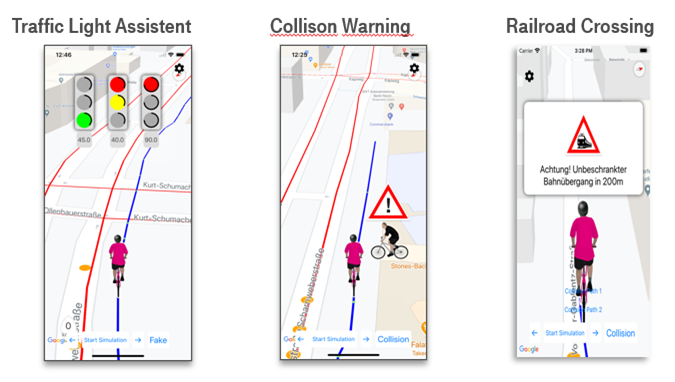
T-Systems tests the traffic light assistant on the test track as part of the National Platform for Mobility RealLabHH
The Reallabor Hamburg connects selected elements of the traffic infrastructure (traffic lights, diagonal cross) with road users so that they can optimise their movement and reach their destination safely and comfortably. T-Systems is developing the GLOSA (Green Light Optimal Speed Advisory) service with the aim of providing car, bicycle and scooter drivers with a "traffic light assistant". For this purpose, the data of the traffic lights from the test track for Automated and Connected Driving (TAVF) are used. The messages are sent to Deutsche Telekom's 5G MobiledgeX server via an online connection. Users receive the messages via their smartphone or directly on the vehicle manufacturer's display. The basis is the transmission of the ISO standardised SPAT (Signal Phase and Time) and MAP (Topology Information of the intersection) messages. Via the GLOSA app, the user receives real-time information about the traffic light phases (Time to Green) and a speed recommendation. Drivers see a countdown to the next green or red phase on their smartphone or in the cockpit of the vehicle.
Period: 03/2021 - 11/2022
Test activities as part of the National Platform for Mobility RealLabHH
Securing a vehicle application to display the traffic light signal groups.The signal groups along the route, including the odometer and the current status, are shown to the driver in the display. There is also a forecast display for the next status change.
Period: 03/2021 - 11/2022
Automated driving (level 4) in urban space
Since the beginning of 2019, Volkswagen Group Research is testing fully automated driving on public roads on the Hamburg test track for automated and connected driving. In addition to technical feasibility, the tests with several specially equipped e-Golf cars also focus on the requirements of the urban infrastructure. For safety reasons, a specially trained driver sits at the wheel during the regular test drives, continuously checking all driving functions and intervening in an emergency. The results of the test drives, which are continuously evaluated, are incorporated into the Group's numerous research projects on autonomous driving, optimizing private transport and testing customer-oriented services.
The initiative is part of the strategic mobility partnership between Volkswagen AG and the Free and Hanseatic City of Hamburg.
Period: 01/2019 - 12/2021
Further information:

European Car Manufacturers test Automated Driving of Level 3 and 4
As part of the Europe-wide pilot test for highly automated driving "L3Pilot", European automobile manufacturers are testing passenger cars on public roads in and around Hamburg. In cooperation with TAVF, the L3Pilot partners are testing the "Urban Chauffeur" in downtown Hamburg and the "Motorway Chauffeur" on the motorways around Hamburg. The L3Pilot project is the first comprehensive European pilot test for automated driving functions of SAE Level 3 and partly Level 4 on public roads. 13 major OEMs and a total of 34 partners from 12 countries have come together to create a common European test environment.
Period: 2020 - 12/2021
Further informationen:

Testing automated driving functions
As part of the ITS World Congress 2021 and the final event of the European research project "L3Pilot", fka GmbH will be testing automated and connected driving at TAVF. For safety reasons, there is always a trained safety driver in the driver's seat who can take over the driving of the vehicle at any time. In addition, an operator sits in the passenger seat who monitors the driving function and communication with the infrastructure. In addition to V2X signals from the traffic signals, the driving function also processes information from a high-precision map and information from the surrounding sensors. For this purpose, the vehicle is equipped with lidar, camera and radar sensors.
Period: 09/2021 - 12/2021
More information:

Scientific development of the VITAL traffic light controls
The DLR developed two novel traffic light controls based on V2X communication: the delay-based and the co-operative VITAL-method. The traffic light controls have already been successfully implemented and validated at real test-intersections in suburban and rural areas. As a scientific user the DLR will now test the methods at the TAVF to advance them for urban areas. Both traffic light controls will be implemented in 2020 at the intersection K94 (Rentzelstraße / Schröderstiftstraße / An der Verbindungsbahn). Afterwards a long-time-validation follows until the end of 2021. Due to the VITAL-methods reduced waiting and travel times for the road users as well as lower pollutant emission are expected.
Period: 03/2019 - 12/2021
Further information:



Automated driving and parking
The Niedersächsisches Forschungszentrum Fahrzeugtechnik (NFF) of TU Braunschweig is developing and testing inner-city automated on-street parking within the project UrbanSmartPark, funded by EIT Urban Mobility. The technical goal is to be able to handle short drives as well as the parking process itself along the TAVF without a driver. This allows an increase in comfort on the one hand and an extended spectrum of parking-related services on the other hand, which are addressed in a business model development and will be offered through a smartphone app to customers. An extension of the research activities to urban automated driving is planned, which is made possible by the TAVF as an excellent digital infrastructure complementing the vehicle’s intelligence.
Period: starting 10/2020 - 12/2021

Traffic light based optimizations
Neusoft's field tests focus on the interaction between vehicles and light signal systems via V2X radio technology according to the IEEE 802.11p standard. The investigations are based on three different areas:
- Analysis of the V2I radio range under different weather conditions by continuous measurements in the field (Ongoing)
- Implementation of an optimal speed recommendation for the driver, so that traffic lights in front can be passed when green (In preparation)
- Influencing the start/stop logic of vehicles to avoid unnecessary engine shutdowns and resulting starting delays (In preparation)
Urban Mobility Lab @ HAW Hamburg
The development of sensors and methods for the localization of vehicles without a valid navigation satellite signal is one main goals of the work done in the Urban Mobility Lab @ HAW Hamburg. To obtain a valid position and orientation information of a vehicle, novel sensors and cameras are combined with high precision environmental models and simulations. Our solutions provide advantages both for Urban-Canyons and for Indoor-Navigation. On top of environmental sensor systems, we support the project with several years of experience in the development and application of embedded systems for mobile data acquisition (mobile IoT) and in environmental measurement systems for acoustic signals. We support the TAVF by systematic analysis of the communication infrastructure during setup and operation.
Period: 2019 – 2020 (extension planned)

PedelACC
PedelACC is a project developed by the semiconductor manufacturer NXP Semiconductors with the aim of protecting vulnerable road users and optimising travel.In addition, the radio technology V2X (Vehicle to Everything) is based on the ETSI ITS G5 V2X standard. PedelACC is a portmanteau created from “Pedelec” (Pedal electric cycle) and “ACC” (Adaptive Cruise Control).
ACC stands for automated distance keeping to the vehicle ahead, but refers here to the assistance system "GLOSA" (Green Light Optimised Speed Advise). The aim is to support vulnerable road users by integrating safety and communication technology (V2X). The main fields of application are protection of vulnerable road users, GLOSA for bike lanes, green phase prioritisation, collision warning, etc. The PedelACC V2X technology will be interoperable with ETSI ITS G5 standard vehicles. With the same technology, successful tests have already been carried out with e-scooters from the company VOI.
Period: 04/2019 – Q3/2021
