
Auswahl von TAVF-Nutzern
Auf der nutzeroffenen Teststrecke werden verschiedenste innovative Mobilitätsanwendungen erprobt und analysiert, um die wachsenden Herausforderungen des innerstädtischen Verkehrs zu bewältigen und neue zukunftsfähige Mobilitätskonzepte für die Freie und Hansestadt Hamburg und andere Großstädte zu identifizieren. Im Folgenden stellen wir Ihnen eine Auswahl der Aktivitäten und daran beteiligten Partnern und mitwirkenden wissenschaftlichen Forschungseinrichtungen näher vor.
Ein Schritt in Richtung automatisiertes Fahren nach SAE Level 4
Logistikunternehmen stehen vor einer großen Herausforderung: Einerseits fehlen ihnen zunehmend die Lkw-Fahrer, andererseits sehen sie sich mit ständig wachsenden Warenströmen konfrontiert. Das autonome Fahren ist deshalb für die gesamte Branche von großem Interesse. Auch die Europäische Kommission hat sich zum Ziel gesetzt, die Forschung in diesem Bereich voranzutreiben und fördert deshalb das Projekt MODI. Ein Konsortium aus 29 Partnern aus Wissenschaft und Wirtschaft erarbeitet und testet Lösungen für den autonomen Lkw-Verkehr. Dabei gilt es, auch rechtliche und technische Hürden zu überwinden und Genehmigungsprozesse länderübergreifend zu erleichtern und zu harmonisieren.
Bildquelle: Gruber Logistics. Hamburg, 2023
Zeitraum: 10/2022 – 03/2026
Mehr dazu:

SILKOSTU (Sicherheit in der intelligenten Kommunikation zwischen Verkehrsteilnehmern und städtischer Infrastruktur)
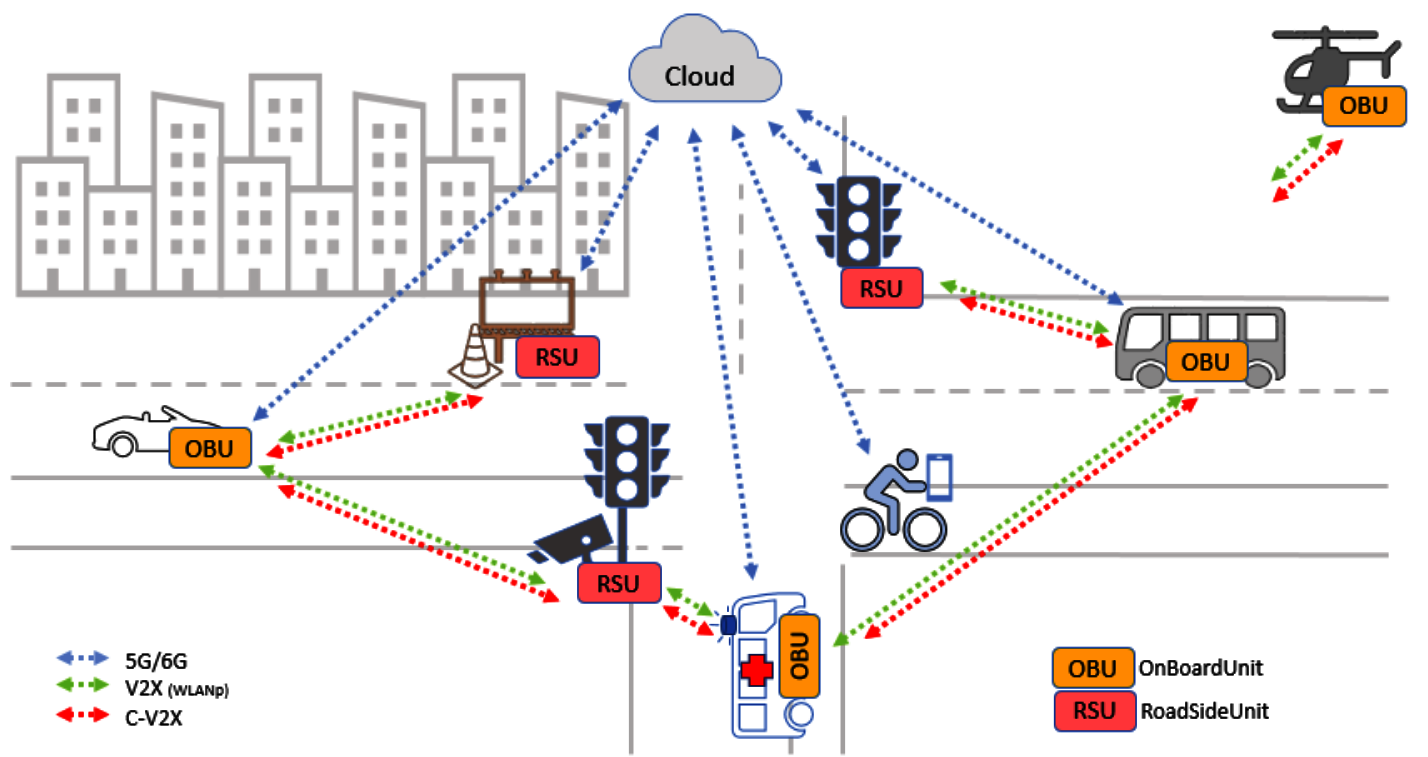
Die direkte Vernetzung aller Akteure im Straßenverkehr ist essenziell für sichere, effiziente und schließlich autonome Mobilität. Dazu werden im Projekt „SILKOSTU – Sicherheit in der intelligenten Kommunikation zwischen Verkehrsteilnehmern und städtischer Infrastruktur“ neue Kommunikationstechnologien entwickelt, die darauf abzielen, alle Verkehrsteilnehmer untereinander zu verbinden und gleichzeitig den Sicherheitsanforderungen allgegenwärtiger Cloud-Verbindungen gerecht zu werden. Das Bestreben von SILKOSTU ist die Erforschung einer Hardware-Plattform, die verschiedene Funktionen sicherer Kommunikation in sich vereint und die angeschlossenen Kommunikationsmodule mittels der Anwendungslogik bedient. SILKOSTU wird im Rahmen des Förderaufrufs „Cyber-Sicherheit und digitale Souveränität in den Kommunikationstechnologien 5G/6G“ vom Bundesamt für Sicherheit in der Informationstechnik gefördert.
Zeitraum: 01/2023 – 12/2024
Mehr dazu:
ITS-CUBE (ITS Concept Urban Bus Equipment)
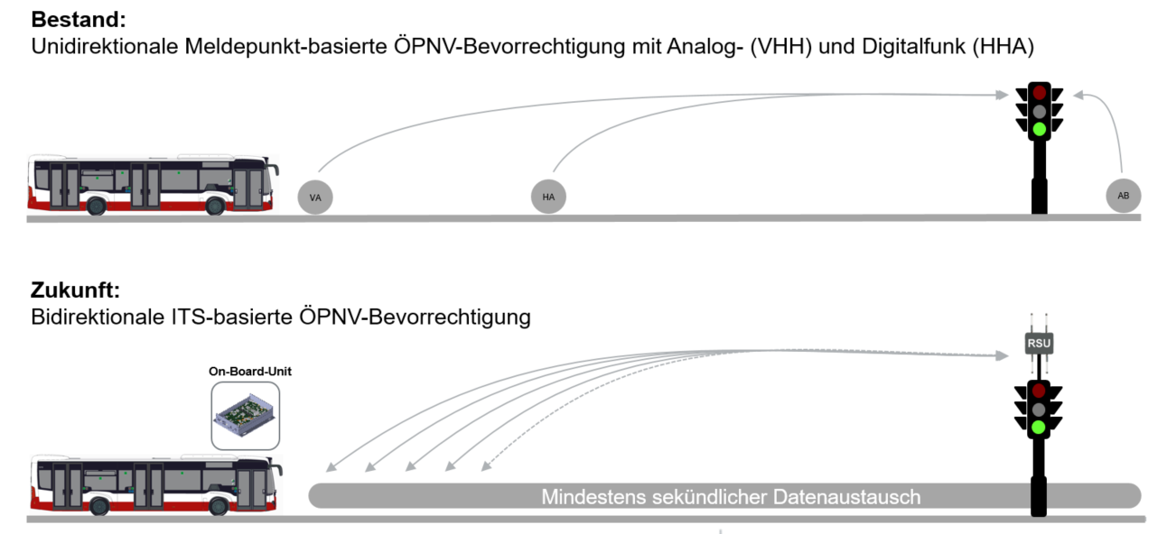
Ziel des Projektes ITS-CUBE ist die Entwicklung einer dynamischen und bedarfsgerechten Priorisierung des öffentlichen Personennahverkehrs an Lichtsignalanlagen mittles einer Vernetzung über moderne Nah- und Fernfeldkommunikation. Konkreter dreht sich das Projekt um die Entwicklung eines ITS-Konzepts für die urbane Bus- und Infrastrukturausstattung, in welchem die Standards, Technologie, Architektur und Methode für die zukünftige Bus-Priorisierung festgelegt werden sollen. Darüber hinaus wird ein Zeitplan für ein Roll-out bis 2030 für eine zügige Umrüstung auf zukunftsträchtige Technologien in der Bus-Priorisierung erarbeitet.
Zeitraum: 06/2023 – 05/2027
Mehr dazu:

Bereitstellung von Prognosewerten für Ampelphasen über kooperative Verkehrsinfrastruktur (Roadside Unit)
Yunex Traffic ist ein weltweit führendes Unternehmen im Bereich intelligenter Verkehrssysteme und bietet das breiteste End-to-End-Portfolio an. Auf der TAVF installiert Yunex Traffic C2X, eine Technologie, die Fahrzeuge mit der Infrastruktur vernetzt, dadurch den Verkehrsfluss optimiert, die Verkehrssicherheit erhöht und die Straßen fit fürs automatisierte Fahren macht. Über das Prognoseverfahren der Schaltzeitenprognose (SPAT Prediction) werden Umschaltzeitpunkte mittels modernster KI-Analyse-Verfahren ermittelt. Diese Prognosen der Ampelphasen werden über Roadside Units an Fahrzeuge übergeben. Zusätzlich ermöglicht die zentrale SPAT-Cloud-Instanz die Weitergabe der Prognose über Serviceprovider an Smartphone-Applikationen.
Zeitraum: 01/2019 – 12/2022
Weitere Informationen:
 Yunex GmbH")
EDDY – European Digital Dynamic Mapping
Das Forschungsprojekt EDDY erarbeitet Standards für offen zugängliche hochaufgelöste dynamische Kartendaten. Bislang sind solche Karten Eigentum großer Navigationsdienste. Mit EDDY werden nun die Grundlagen geliefert, damit auch Städte, Gemeinden und Kommunen die Daten selbst in einer Urban Dynamic Map gemeinwohlorientiert und öffentlich bereitstellen können. Hochaufgelöste, dynamische Karten werden für die Lenkung des urbanen Verkehrs, beispielsweise bei der Routenfindung, insbesondere auch auf Strecken mit Baustellen, benötigt. Ziel ist die Reduktion von Emissionen, der Schutz von vulnerablen Verkehrsteilnehmenden sowie die Ermöglichung höherer Stufen des automatisierten Fahrens. Die Projektpartner können mit speziell ausgerüsteten Fahrzeugen die Anwendungsfälle auf der Hamburger Teststrecke für automatisiertes und vernetztes Fahren (TAVF) erproben.
Zeitraum: 11/2021 – 10/2024
Weitere Informationen:
 EDDY project")
NextPerception
Das Projekt NextPerception beabsichtigt, einen Sprung über den derzeitigen Stand der Technik der Sensorik hinaus zu machen und ein höheres Niveau von Diensten zu erreichen, die auf Informationen basieren, die durch die Beobachtung von Menschen und ihrer Umgebung gewonnen werden.
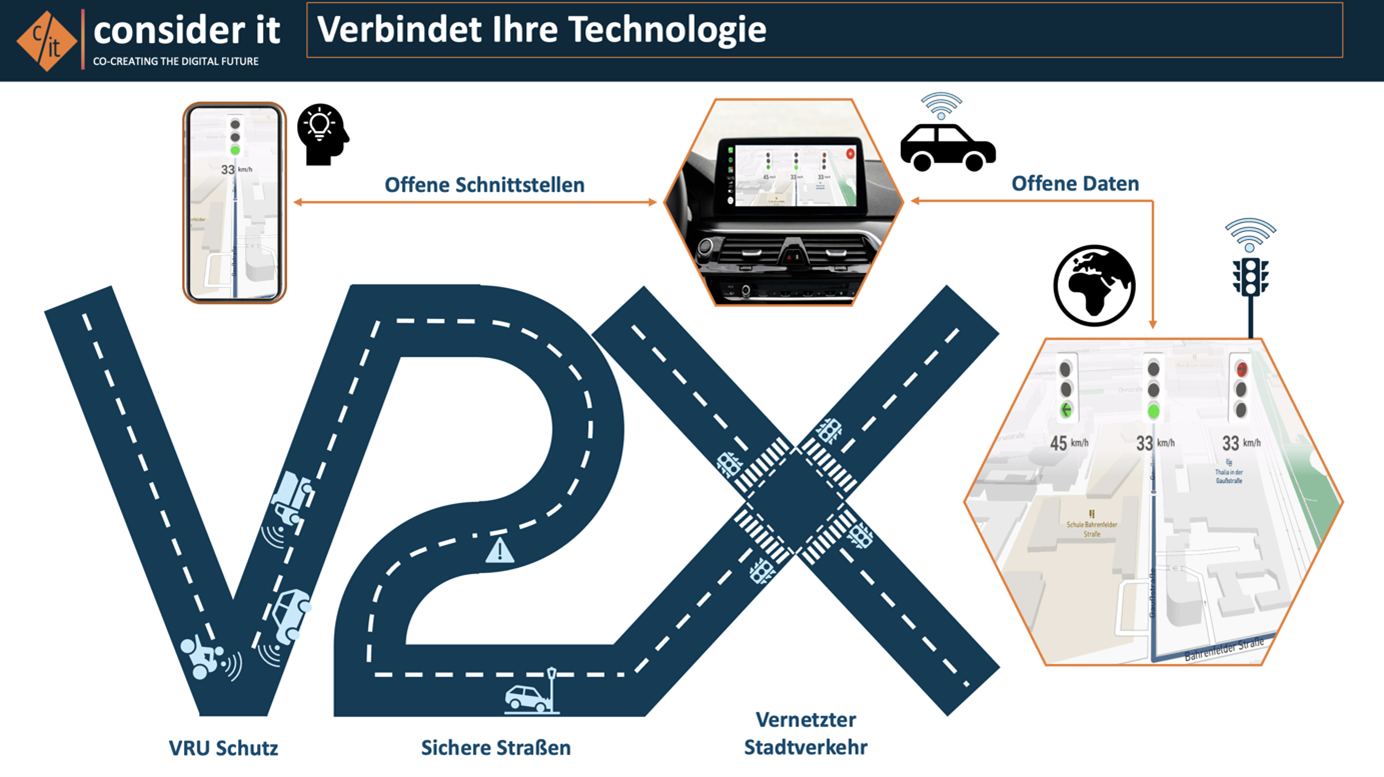
Im Use Case „Safety and comfort at intersections” arbeiten verschiedene Organisationen an Möglichkeiten verletzte Verkehrsteilnehmer (VRU) wie Fußgänger und Fahrradfahrer im Kreuzungsbereich zu schützen. Um die Entwicklungen außerhalb einer Laborumgebung erproben zu können übernimmt die consider it GmbH die Betreiberrolle an einer Kreuzung in der Hafencity. Dort werden zusammen mit Partnern aus dem Projekt Demonstratoren zum VRU-Schutz getestet.
Zeitraum: 05/2022 - 12/2023
Weitere Informationen:
 consider it")
Shared Guide Dog 4.0
Ziel des Projekts Shared Guide Dog 4.0 ist die Entwicklung eines technischen Assistenzsystems, das Blinde und Sehbehinderte im urbanen Nahfeld navigiert. Wie beim Bike Sharing wird auch der Guide Dog 4.0 im Sharing-Modell zahlreichen Personen zur Verfügung stehen, was die Kosten senkt. Er kann beispielsweise bei einer Wohngruppe für Blinde seine Heimat haben und einzelne Personen von der nächstgelegenen U-Bahn-Station abholen oder zum Arzt leiten.
Auf der TAVF werden die Lokalisierung im urbanen Raum und die Kommunikation mit anderen Verkehrsteilnehmern erprobt. Ebenso wird die Infrastruktur zum Schutz vulnerabler Verkehrsteilnehmer getestet.
Zeitraum: 01/2022 - 12/2023
Weitere Informationen:

5G-Loginnov
5G-LOGINNOV erforscht technologische und gesellschaftliche Innovationen, die sich durch 5G im Zusammenhang mit der Digitalisierung von Häfen ergeben. Das Projekt wird durch das EU-Forschungs- und Innovationsprogramm „Horizont 2020“ kofinanziert.
In den Häfen von Athen (GR), Luka Koper (SLO) und Hamburg (D) werden diese Innovationen in Form von Living-Labs (LL) getestet. Das LL Hamburg fokussiert sich auf den Bereich außerhalb des Hafens. Die Partner SWARCO, tec4U, Continental und T-Systems zeigen hier, wie der Einsatz von 5G in der hybriden V2X-Kommunikation und im intelligenten Verkehrsmanagement zur Reduzierung negativer Umwelteinflüsse beitragen kann. Anwendungsfälle sind u.a. Floating Truck and Emission Data (FTED), 5G based Green Light Optimum Speed Advisory (GLOSA) und dynamic control loop for traffic management actions (DCET).
Eine erste Demonstration fand während des ITS-Weltkongresses vom 11. bis 15. Oktober 2021 statt.
Zeitraum: 10/2021 - 12/2023
Weitere Informationen:

Priorisierung von Einsatzfahrzeugen an Lichtsignalanlagen
Als Mitglied der Projektgruppe BOS Realtime Routing arbeitet die Feuerwehr Hamburg an der Priorisierung von Einsatzfahrzeugen an Lichtsignalanlagen zur verbesserten Sicherheit von Alarmfahrten an Verkehrsknotenpunkten. Hierbei stehen die Vermeidung von Unfällen während der Einsatzfahrten, der Schutz der Einsatzkräfte, die Vermeidung von Verkehrsunfällen Dritter sowie die schnellere Erreichbarkeit der Einsatzstelle besonders im Fokus. Die Umsetzung des C-ITS-Dienstes TSP (Traffic signal priority request) erfolgt dabei auf Basis der Kommunikation zwischen Einsatzfahrzeug und Lichtsignalanlage über ITS-G5. Die Einsatzfahrzeuge senden die Priorisierungsanfrage mit Hilfe einer im Fahrzeug verbauten Vehicle ITS Station (V-ITS-S) an die Roadside ITS Station (R-ITS-S) der Lichtsignalanlage. In der Lichtsignalanlagen wird dann die Schaltung eines speziellen Steuerprogramms veranlasst, welches die Kreuzung für die Überfahrt des Einsatzfahrzeuges räumt.
Das Pilotprojekt wird aktuell zusammen mit dem LSBG, der HHVA und der BVM an der Innenstadtwache der Feuerwehr Hamburg an sechs Einsatzfahrzeugen getestet.
Zeitraum: 2020-2022
 Feuerwehr Hamburg")

Smarte Infrastruktur für automatisiert-assistiertes Fahren
Das Fraunhofer IVI bringt mit dem Fraunhofer Cluster of Excellence Cognitive Internet Technologies CCIT das automatisierte Fahren in Städten voran: Eine intelligente Kreuzung (Smart Intersection) in der Hamburger Innenstadt erfasst vertrauenswürdig die Bewegungen der Verkehrsteilnehmenden, wandelt diese in eine digitale dynamische Objektkarte um und kommuniziert die Verkehrslage an alle Verkehrsteilnehmer über Car2X-Kommunikation.
Die Erfassung des Verkehrs verbessert nicht nur den Verkehrsfluss, sondern trägt maßgeblich zur Erhöhung der Sicherheit aller Verkehrsteilnehmer bei. Zur Absicherung der Manipulationsrisiken kognitiver Funktionen kommen innovative Algorithmen zum Einsatz. Somit wird der Aspekt der Maßnahmen zum Schutz kritischer Infrastrukturen (KRITIS) integral berücksichtigt.
Zeitraum: 10/2021 - 12/2022
Weitere Informationen:

Aftermarket V2X
Die consider it versteht, dass Veränderungen nicht immer einfach sind. Seit 2010 hilft consider it Unternehmen aller Größenordnungen, durch neue Technologien und Innovationen auf Marktveränderungen zu reagieren, um wettbewerbsfähig zu bleiben. Mehr noch: consider it treibt Marktänderungen durch Innovation. Mit 10 Jahren Projekterfahrung, über 110 Projektpartnern und 53 Millionen Euro erworbenen Fördergeldern, setzt sich consider it dafür ein, den Forschungs- und Entwicklungsstandort Deutschland zu stärken.
Auf der TAVF Strecke werden drei Initiativen aktiv sein:
- Fortgesetzte Kooperation mit TAVF-Partnern auf der Teststrecke, sowohl über Förderprojekt-Inititativen als auch durch bilaterale Abstimmung.
- Weiterführung bereits laufender Mess- und Validierungsfahrten für die installierte Infrastruktur (RSUs) sowie für mobile Einheiten (OBUs)
- Entwicklung einer eigenen V2X Lösung für Aftermarket V2X Installationen in vorhandene Fahrzeuge und Modelle
Zeitraum: 06/2021 - 12/2022
Weitere Informationen:
Erhöhung der Verkehrssicherheit durch Optimierung der Steuerung von Lichtsignalanlagen und Erkennung schwächerer Verkehrsteilnehmer
Die VITRONIC Dr.-Ing. Stein Bildverarbeitungssysteme GmbH nutzt Sensoren, um schwächere Verkehrsteilnehmer (VRU/Vulnerable Road Users) wie Radfahrer oder Fußgänger auf der Teststrecke zu erfassen, um deren Position an autonome Fahrzeuge weitergeben zu können. Durch die Erfassungen und Weitergabe von Bewegungstrajektorien dieser Verkehrsteilnehmer können Fahrzeuge auf potentiell sicherheitskritische Verkehrssituationen hingewiesen werden. Die Datenübertragung erfolgt dabei über standardisierte Message-Formate. Darüber hinaus installiert VITRONIC zur Beobachtung des fließenden Verkehrs im Kreuzungsbereich Schröderstiftstraße / Rentzelstraße hoch performante Sensorik. Die gewonnenen Verkehrsdaten fließen in das Steuerverfahren für Lichtsignalanlagen (LSA) des Instituts für Verkehrssystemtechnik des Deutschen Zentrums für Luft und Raumfahrt (DLR) ein. Die Endauswertung der Daten, die eine optimierte Ampelschaltung ermöglicht, erfolgt durch das DLR.
Zeitraum: 08/2020 - 12/2022

Kollisionswarnung für schwächere Verkehrsteilnehmer basierend auf 5G Technologie
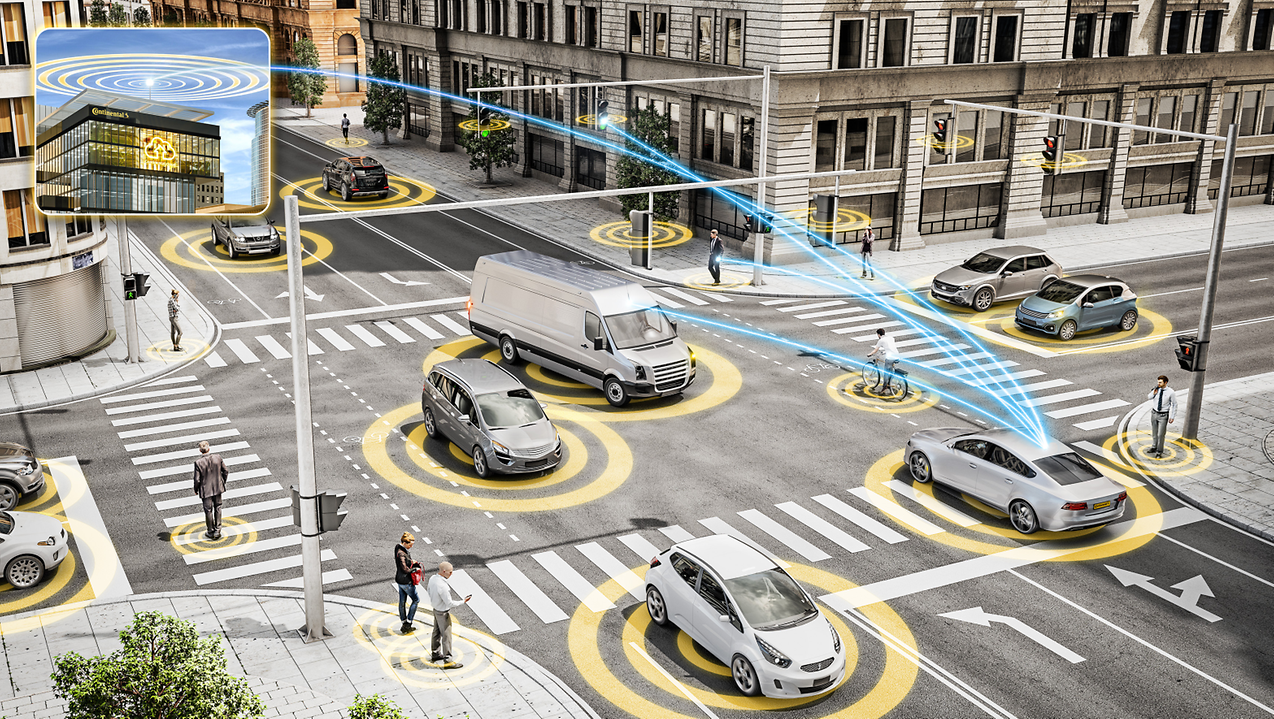
Ziel ist die Erhöhung der Sicherheit aller Verkehrsteilnehmer mittels vernetzter Kollisionswarnung. Der Schwerpunkt liegt hier bei Radfahrer, Fußgänger und E-Scooter Fahrer unter Einbeziehung von Fahrzeugen (PKW, L4 Shuttle Buses, etc.).
Als Teil der 5G Strategie soll MEC (Mobile Edge Computing) zum Einsatz kommen. Die Partner Continental, Deutsche Telekom und MobiledgeX ermöglichen eine Berechnung von potenziellen Kollisionen sowie Bewertung und Bereitstellung der Informationen an die jeweiligen Verkehrsteilnehmer mit niedriger Latenz und hoher Verfügbarkeit durch den Einsatz von Edge Computing.
Zeitraum: 02/2020 – 12/2022
T-Systems testet den Ampelassistenten auf der Teststrecke im Rahmen der Nationalen Plattform Mobilität RealLabHH
Das Reallabor Hamburg vernetzt ausgewählte Elemente der Verkehrsinfrastruktur (Lichtsignalanlagen, Andreaskreuze) mit den Verkehrsteilnehmern, so dass diese ihre Fortbewegung optimieren und sicher und komfortabel ans Ziel kommen. T-Systems entwickelt den GLOSA (Green Light Optimum Speed Advice) Dienst mit dem Ziel, dem PKW-, Fahrrad-, und Scooterfahrer einen „Ampel-Assistenten“ zur Verfügung zu stellen. Hierzu werden die Daten der Lichtsignalanlagen aus dem Testfeld - Automatisiertes und Vernetztes Fahren (TAVF) genutzt. Die Nachrichten werden über eine Internetverbindung an den 5G MobiledgeX Server der Deutschen Telekom gesendet. Die Nutzer erhalten die Nachrichten über ihr Smartphone oder direkt auf dem Display des Fahrzeugherstellers. Basis ist die Übertragung der ISO standardisierten SPAT (Signal Phase and Time) und MAP (Topology Information of the intersection) Nachrichten. Über die GLOSA App erhält der Nutzer Echtzeitinformationen (Time to Green) über die Ampelphasen und eine Geschwindigkeitsempfehlung. Fahrer sehen auf dem Smartphone oder im Cockpit des Fahrzeugs einen Countdown bis zur nächsten Grün- bzw. Rotphase.
Zeitraum: 03/2021 - 11/2022
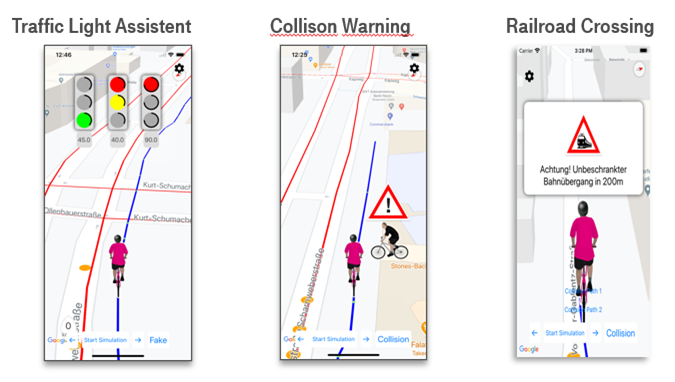
Testaktivitäten im Rahmen der Nationalen Plattform Mobilität RealLabHH
Absicherung einer Fahrzeugapplikation zur Anzeige der Ampelsignalgruppen. Dem Fahrer werden hierbei die auf der Fahrtstrecke liegenden Signalgruppen inklusive Odometer und aktuellem Status im Display angezeigt. Zusätzlich gibt es eine Prognose Anzeige für den nächsten Statuswechsel.
Zeitraum: 03/2021 - 11/2022
Automatisiertes Fahren (Level 4) im urbanen Raum
Die Volkswagen Konzernforschung erprobt auf der Hamburger Teststrecke für automatisiertes und vernetztes Fahren seit Anfang 2019 das vollautomatisierte Fahren im öffentlichen Straßenverkehr. Im Fokus der Tests mit mehreren speziell ausgerüsteten e-Golf stehen neben der technischen Machbarkeit auch die Anforderungen an die städtische Infrastruktur. Aus Sicherheitsgründen sitzt bei den regelmäßigen Testfahrten durchgehend ein besonders geschulter Fahrer am Steuer, der alle Fahrfunktionen fortwährend überprüft und im Notfall eingreifen kann. Die Ergebnisse der Fahrten, die kontinuierlich ausgewertet werden, fließen in die zahlreichen Forschungsprojekte des Konzerns zum autonomen Fahren, zur Optimierung des Individualverkehrs und zur Erprobung kundenorientierter Serviceleistungen mit ein.
Die Initiative ist Teil der strategischen Mobilitätspartnerschaft zwischen der Volkswagen AG und der Freien und Hansestadt Hamburg.
Zeitraum: 01/2019 - 12/2021
Weitere Informationen:

Europäische Automobilhersteller testen hochautomatisiertes Fahren in und um Hamburg
Im Rahmen des europaweiten Pilotversuchs für hochautomatisiertes Fahren "L3Pilot" testen Europäische Automobilhersteller ihre Personenkraftfahrzeuge auf öffentlichen Straßen in und um Hamburg. Die L3Pilot-Partner testen in Zusammenarbeit mit TAVF den "Urban Chauffeur" in der Hamburger Innenstadt und den "Motorway Chauffeur" auf der Autobahn um Hamburg. Das Projekt L3Pilot ist der erste umfassende europäische Pilotversuch für automatisierte Fahrfunktionen der SAE Level 3 und teilweise auch Level 4 auf öffentlichen Straßen. 13 wichtige OEMs und insgesamt 34 Partner aus 12 Ländern haben sich zusammengeschlossen, um eine einheitliche europäische Testumgebung auf Europas Straßen zu schaffen.
Zeitraum: 2020 - 12/2021
Weitere Informationen:

Erprobung automatisierter Fahrfunktion
Im Rahmen des ITS World Congress 2021 und dem Abschlussevent des europäischen Forschungsprojekts „L3Pilot“ erprobt die fka GmbH auf der TAVF das automatisierte und vernetzte Fahren. Aus Sicherheitsgründen sitzt immer ein speziell geschulter Sicherheitsfahrer auf dem Fahrersitz, der jederzeit die Fahrzeugführung übernehmen kann und die Verantwortung trägt. Zusätzlich sitzt ein Operator auf dem Beifahrersitz der die Fahrfunktion und die Kommunikation mit der Infrastruktur überwacht. Die Fahrfunktion verarbeitet neben den V2X-Signalen der Lichtsignalanlagen auch Informationen aus einer hochgenauen Karte sowie den Informationen der Umfeldsensoren. Dafür ist das Fahrzeug mit Lidar-, Kamera- und Radarsensoren ausgestattet.
Zeitraum: 09/2021 - 12/2021
Weitere Informationen:

Wissenschaftliche Weiterentwicklung der VITAL-Steuerverfahren für Lichtsignalanlagen
Das DLR hat mit den VITAL-Verfahren zwei neuartige auf V2X-Kommunikation ausgerichtete Steuerverfahren für Lichtsignalanlagen (LSA) entwickelt. Die Verfahren wurden bereits an realen Testkreuzungen im suburbanen bzw. ländlichen Umfeld erfolgreich umgesetzt und validiert. Als wissenschaftlicher Nutzer testet das DLR die Steuerungen nun auch im urbanen Raum auf der TAVF. Beide Verfahren werden dazu Mitte 2020 am Knoten K94 (Rentzelstraße / Schröderstiftstraße / An der Verbindungsbahn) implementiert. Anschließend erfolgt eine Langzeitvalidierung bis zum Ende des Jahres 2021. Durch die VITAL-Verfahren werden u.a. reduzierte Warte- und Reisezeiten für die Verkehrsteilnehmer sowie geringere Schadstoffemissionen erwartet.
Zeitraum: 03/2019 - 12/2021
Weitere Informationen:



Automatisiertes Fahren und Parken
Das Niedersächsische Forschungszentrum Fahrzeugtechnik (NFF) der Technischen Universität Braunschweig entwickelt und erprobt u .a. im Rahmen des derzeit durch das EIT Urban Mobility geförderten Projektes UrbanSmartPark das automatisierte on-street-Parken im urbanen Raum. Ziel ist es, entlang der TAVF kurze Fahrstrecken sowie Ein- und Ausparkvorgänge fahrerlos durchzuführen. Dies ermöglicht neben Komfortsteigerungen auch ein erweitertes Spektrum an Dienstleistungsmöglichkeiten, welche im Rahmen einer Geschäftsmodellentwicklung beleuchtet und als Smartphone-App angeboten werden sollen. Darüber hinaus ist geplant, das Forschungsprogramm auf urbanes automatisiertes Fahren auszudehnen, für das mit der TAVF eine hervorragende Ergänzung der Fahrzeugintelligenz durch digitale Infrastruktur vorliegt.
Zeitraum: ab 10/2020 - 12/2021

LSA-basierte Optimierungen
Im Fokus der Felderprobungen von Neusoft steht die Interaktion zwischen Fahrzeugen und Lichtsignalanlagen über V2X-Funktechnik nach dem IEEE 802.11p-Standard. Die Untersuchungen stützen sich auf drei verschiedene Bereiche:
- Analyse der V2I Funkreichweite bei verschiedenen Wetterbedingungen durch kontinuierliche Messungen im Feld (Laufend)
- Umsetzung einer optimalen Geschwindigkeitsempfehlung für den Fahrer, damit vorausliegende Ampeln bei grün passiert werden können (In Vorbereitung)
- Beeinflussung der Start-Stopp-Logik von Fahrzeugen zur Vermeidung unnötiger Motorabschaltungen und daraus resultierenden Anfahrverzögerungen (In Vorbereitung)
Urban Mobility Lab @ HAW Hamburg
Im Urban Mobility Lab an der HAW Hamburg werden Sensoren und Verfahren entwickelt, um die Position von Fahrzeugen zu bestimmen, wenn der Empfang von Navigationssatelliten gestört oder nicht verfügbar ist. Hierzu werden unterschiedliche, neuartige Sensoren und Kameras mit hochpräzisen Umfeld-Modellen und Simulationen kombiniert. Neben der Nutzung in Urban-Canyons entstehen hierdurch auch Lösungen für die Indoor-Navigation. Neben Umfeld- Sensorsystemen bringen wir Kompetenzen in der Entwicklung und dem Betrieb eingebetteter Systeme für die mobile Datenaufnahme (mobile IoT) sowie im Bereich der Umweltmesstechnik für akustische Signale ein. Wir unterstützen die TAVF durch Untersuchungen an der Kommunikationsinfrastruktur im Aufbau sowie im laufenden Betrieb.
Zeitraum: 2019 – 2020 (Verlängerung ist geplant)

PedelACC
PedelACC ist ein vom Halbleiterhersteller NXP Semiconductors entstandenes Projekt mit dem Ziel, schwache Verkehrsteilnehmer im Straßenverkehr zu schützen und Fahrten zu optimieren. Hierzu kommt die Funktechnik V2X (Vehicle to Everything), basierend auf dem V2X-Standard ETSI ITS G5, zum Einsatz. PedelACC ist ein Kofferwort aus “Pedelec” (Pedal electric cycle) und “ACC” (Adaptive Cruise Control).
Unter ACC wird ein automatisiertes Abstandhalten zum vorausfahrenden Fahrzeug verstanden, bezieht sich hier aber auf das Assistenzsystem „GLOSA” (Green Light Optimised Speed Advise). Das Ziel ist, schwache Verkehrsteilnehmer durch Integration von Sicherheits- und Kommunikationstechnologie (V2X) zu unterstützen. Haupt-Anwendungsfelder sind Schutz schwacher Verkehrseilnehmer, GLOSA für Radwege, Grünphasenpriorisierung, Kollisionswarnung etc. Die PedelACC-V2X-Technologie wird interoperabel mit Fahrzeugen nach dem Standard ETSI ITS G5 sein. So konnten mit der selben Technologie schon erfolgreich Tests mit e-Scootern der Firma Voi durchgeführt werden.
Zeitraum: 04/2019 – Q3/2021
